A simple tokamak equilibrium
In this tutorial, we compute an axisymmetric equilibrium magnetic field for a simple tokamak configuration. We do the set-up here in a self-contained but verbose manner for clarity. Enabling 64-bit precision is crucial.
[ ]:
import matplotlib.pyplot as plt
import jax
import jax.numpy as jnp
from jax.numpy import cos, pi, sin
import diffrax as dfx
from mrx.relaxation import MRXDiagnostics, State, TimeStepper
from mrx.differential_forms import DiscreteFunction
from mrx.derham_sequence import DeRhamSequence
from mrx.mappings import invert_map, approx_inverse_map
from mrx.plotting import intersect_with_plane
jax.config.update("jax_enable_x64", True)
The map we use here is that of a simple tokamak with slightly elliptical cross-section, so the only geometric parameters are the aspect ratio \(\varepsilon\) and the elongation \(\kappa\).
[ ]:
ɛ = 0.33
κ = 1.1
def Phi(x):
r, θ, ζ = x
R = 1 + ɛ * r * cos(2 * pi * θ)
Z = ɛ * κ * r * sin(2 * pi * θ)
return jnp.array([R * cos(2 * pi * ζ), -R * sin(2 * pi * ζ), Z])
Next, we get our de Rham sequence object…
[8]:
Seq = DeRhamSequence(
(12, 12, 1), # nb. of splines in (r, θ, ζ)
(3, 3, 0), # degree of splines in (r, θ, ζ)
5, # nb. of quadrature points per spline
("clamped", "periodic", "constant"), # spline type in (r, θ, ζ)
Phi, # mapping from (r, θ, ζ) to (x, y, z)
polar=True, # domain has a polar singularity
dirichlet=True # impose Dirichlet BCs on r=1 boundary
)
…and assemble the operators we need for the relaxation.
[5]:
Seq.evaluate_1d()
Seq.assemble_all()
Seq.build_crossproduct_projections()
Seq.assemble_leray_projection()
Next, we need to decide on an initial magnetic field. We use a Solov’ev state with the parameter \(q_*\) determining the ratio of toroidal to poloidal field. The initial field does not satisfy our boundary conditions, so when we project it onto the discrete space, we break the equilibrium. The relaxation will then bring us back to an equilibrium state that does satisfy the boundary conditions.
We provide the field in the cartesian frame \((B_x, B_y, B_z)\) as a function of the logical coordinates \((r, \theta, \zeta)\). In practice, we do so by a de-tour through \((R, \phi, z)\) cylindrical coordinates.
[6]:
q_star = 1.54
τ = q_star * κ * (κ**2 + 1) / (κ + 1)
def B_0(p):
x, y, z = Phi(p)
R = (x**2 + y**2)**0.5
phi = jnp.arctan2(y, x)
BR = z * R
Bphi = τ / R
Bz = - (0.5 * κ**2 * (R**2 - 1**2) + z**2)
Bx = BR * cos(phi) - Bphi * sin(phi)
By = BR * sin(phi) + Bphi * cos(phi)
return jnp.array([Bx, By, Bz])
Projection to the discrete space is done as usual via a Galerkin projection. The analytic version of this is given by
The \(i\)-th basis function of the two-form space \(V_2\), pushed forward to the physical domain, is denoted by \(\Lambda_i^2\). We pull this problem back to the logical domain, apply quadrature and solve for the coefficients \(\mathtt{B}_i\).
or, in terms of matrices and projectors,
We apply a Leray projection to make the initial condition exactly discretely divergence-free before starting the relaxation and also normalize it to unit norm.
[52]:
B_dof = jnp.linalg.solve(Seq.M2, Seq.P2(B_0))
B_dof = Seq.P_Leray @ B_dof
B_dof /= (B_dof @ Seq.M2 @ B_dof)**0.5
To compute diagnostics throughout the relaxation, we offer a convenience wrapper that computes quantities of interest. The force_free flag would restrict to the \(\beta=0\) case. We JIT-compile the individual diagnostic functions for performance.
In order to make it more transparent to the user, no function in the MRX source code is compiled by default - the user has to explicitly JIT-compile functions they want to use repeatedly.
[ ]:
diagnostics = MRXDiagnostics(Seq, force_free=False)
get_pressure = jax.jit(diagnostics.pressure)
get_helicity = jax.jit(diagnostics.helicity)
For the relaxation, we set up a state object to hold all relevant data, parameters and diagnostics. Note that all elements of the state can change throughout the relaxation, it is for example possible to turn on resistivity when the force appears to plateau.
In this example, we do not use the Newton method to move towards the equilibrium and hence set the Hessian matrix to None.
[ ]:
state = State(
B_dof, # Current magnetic field DOFs B_{n}
B_dof, # Magnetic field DOFs at next time step B_{n+1}
1e-3, # (initial) time-step size dt
0.0, # resistivity η
None, # Hessian matrix δ²𝓔(B)
0, # number of Picard iterations k
0, # Picard residual ϵ
0, # L2 norm of the force J×B - grad p
0 # L2 norm of the velocity u
)
The actual relaxation is done via a TimeStepper object that under the hood holds the Picard solver as well as the relaxation update rule. The parameters passed to the TimeStepper are constant throughout the relaxation.
[ ]:
timestepper = TimeStepper(
Seq, # de Rham sequence
gamma=0, # apply (1 - Δ)^{-γ} to the velocity to smooth it
newton=False, # do not use Newton method
force_free=False, # pressure is non-zero
picard_tol=1e-12, # Picard solver tolerance
picard_maxit=20 # max. nb. of Picard iterations before restart with dt/2
)
As a reminder, what the TimeStepper does is at every time step solve the Picard fixed-point problem
In this tutorial, we have set \(\eta = 0\) and \(\mathcal A = \Pi^{\text{Leray}}\).
We now get our state-updating method from the timestepper, JIT it for performance, and run it once to compile. This step function takes and returns a State.
[56]:
step = jax.jit(timestepper.picard_solver)
dry_run = step(state)
For this tutorial, we monitor the helicity and force residual throughout the relaxation.
[57]:
force_trace = [ dry_run.force_norm ]
helicity_trace = [ get_helicity(dry_run.B_n) ]
print(f"Initial force error: {force_trace[-1]:.2e}")
print(f"Initial helicity: {helicity_trace[-1]:.2e}")
Initial force error: 2.76e-04
Initial helicity: 3.48e-02
We will run the relaxation loop for a fixed number of iterations. It is easy to extend this code to also store the Picard iteration count, time-step size, or other diagnostics.
For reference, \(10^3\) iterations should take around one minute on an M1 CPU using the default resolution (\(12 \times 12 \times 1\) cubic B-splines). For higher resolutions, we recommend using a GPU backend.
[58]:
num_iters_inner = 100
for i in range(10):
for _ in range(num_iters_inner):
state = step(state) # perform one relaxation step
if (state.picard_residuum > timestepper.picard_tol
or ~jnp.isfinite(state.picard_residuum)):
# Picard solver did not converge - reduce dt and retry
state = timestepper.update_dt(state, state.dt / 2)
state = timestepper.update_B_guess(state, state.B_n)
continue
# otherwise, we converged - proceed
state = timestepper.update_B_n(state, state.B_guess)
if state.picard_iterations < 4:
dt_new = state.dt * 1.01 # took very few Picard iterations - increase dt
else:
dt_new = state.dt / 1.01 # took many Picard iterations - decrease dt
state = timestepper.update_dt(state, dt_new)
force_trace.append(state.force_norm)
helicity_trace.append(get_helicity(state.B_n))
print(f"Iteration {(i+1) * num_iters_inner}, force norm: {state.force_norm:.2e}")
Iteration 100, force norm: 2.31e-04
Iteration 200, force norm: 1.99e-04
Iteration 300, force norm: 1.72e-04
Iteration 400, force norm: 1.48e-04
Iteration 500, force norm: 1.29e-04
Iteration 600, force norm: 1.13e-04
Iteration 700, force norm: 1.00e-04
Iteration 800, force norm: 8.94e-05
Iteration 900, force norm: 8.00e-05
Iteration 1000, force norm: 7.17e-05
At the cost of a bit more complex code we can also replace the inner Python loop with a JAX lax.scan. We do not replace both loops here to be able to do logging, storing to disk, etc. more easily in the outer loop. However, the overhead of the Python loop is usually not dominating the actual computation time.
lax.scan automatically compiles body_fn, so we do not JIT it ourselves.
[ ]:
def body_fn(state, _):
# ---- one state update ----
state = step(state)
failed = (state.picard_residuum > timestepper.picard_tol) | (~jnp.isfinite(state.picard_residuum))
def on_fail(state):
state = timestepper.update_dt(state, state.dt / 2)
state = timestepper.update_B_guess(state, state.B_n)
return state
def on_success(state):
state = timestepper.update_B_n(state, state.B_guess)
dt_new = jnp.where(state.picard_iterations < 4,
state.dt * 1.01, # few iterations → increase dt
state.dt / 1.01) # many iterations → decrease dt
return timestepper.update_dt(state, dt_new)
state = jax.lax.cond(failed, on_fail, on_success, state)
return state, None
[97]:
for i in range(10):
# ---- run scan ----
state, _ = jax.lax.scan(body_fn, state, jnp.arange(num_iters_inner))
force_trace.append(state.force_norm)
helicity_trace.append(get_helicity(state.B_n))
print(f"Iteration {(i+11) * num_iters_inner}, force norm: {state.force_norm:.2e}")
Iteration 1100, force norm: 1.52e-05
Iteration 1200, force norm: 1.47e-05
Iteration 1300, force norm: 1.43e-05
Iteration 1400, force norm: 1.40e-05
Iteration 1500, force norm: 1.37e-05
Iteration 1600, force norm: 1.33e-05
Iteration 1700, force norm: 1.31e-05
Iteration 1800, force norm: 1.28e-05
Iteration 1900, force norm: 1.25e-05
Iteration 2000, force norm: 1.23e-05
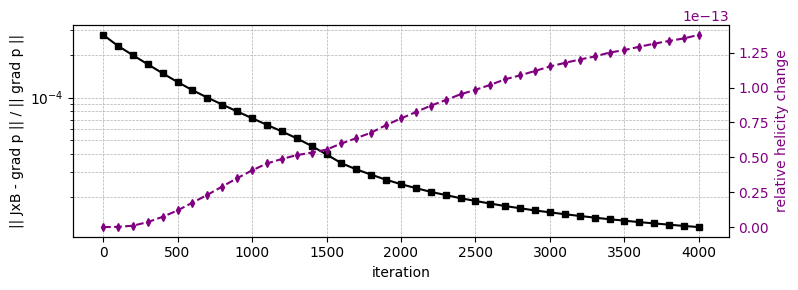
We plot the force residual and helicity error throughout the relaxation.
[98]:
fig, ax1 = plt.subplots(figsize=(8, 3))
ax1.semilogy(jnp.arange(len(force_trace)) * num_iters_inner, jnp.array(force_trace), color='black', ls='-', marker='s', ms=4)
ax1.set_xlabel('iteration')
ax1.set_ylabel('|| JxB - grad p || / || grad p ||', color='black')
ax1.tick_params(axis='y', labelcolor='black')
ax2 = ax1.twinx()
ax2.plot(jnp.arange(len(helicity_trace)) * num_iters_inner, jnp.abs((jnp.array(helicity_trace) - helicity_trace[0]) / helicity_trace[0]), color='purple', ls='--', marker='d', ms=4)
ax2.set_ylabel('relative helicity change', color='purple')
ax2.tick_params(axis='y', labelcolor='purple')
ax1.grid(True, which="both", linestyle='--', linewidth=0.5)
fig.tight_layout()
plt.show()
Lastly, some visualizations. We begin by plotting the pressure contours in the logical and physical domain. We also visualize the grid lines and emphasize that our grid is not flux-aligned.
[ ]:
p_dof = get_pressure(state.B_n)
p_h = jax.jit(DiscreteFunction(p_dof, Seq.Lambda_0, Seq.E0)) # p as a function of logical coordinates
n_vis = 64
_r = jnp.linspace(0, 1, n_vis)
_θ = jnp.linspace(0, 1, n_vis)
_ζ = jnp.zeros(1)
_rgrid, _θgrid, _ζgrid = jnp.meshgrid(_r, _θ, _ζ, indexing="ij") # cartesian mesh in (r, θ, ζ)
_x_hat = jnp.stack([_rgrid, _θgrid, _ζgrid], axis=-1).reshape(-1, 3) # logical evaluation points
_x = jax.vmap(Phi)(_x_hat) # physical evaluation points
R = _x[:, 0].reshape(n_vis, n_vis)
Z = _x[:, 2].reshape(n_vis, n_vis)
p_vals = jax.vmap(p_h)(_x_hat).reshape(n_vis, n_vis) * 1e2
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(8, 4), constrained_layout=True)
# physical
ax1.contourf(R, Z, p_vals, levels=25, cmap="plasma")
for i in range(0, n_vis, 4):
ax1.plot(R[i,:], Z[i,:], 'k', lw=1, alpha=0.1)
for j in range(0, n_vis, 4):
ax1.plot(R[:,j], Z[:,j], 'k', lw=1, alpha=0.1)
ax1.set(xlabel="R", ylabel="z", aspect="equal")
# logical
r, θ = _rgrid.squeeze(), _θgrid.squeeze()
c2 = ax2.contourf(r, θ, p_vals, levels=25, cmap="plasma")
for i in range(0, n_vis, 4):
ax2.plot(r[i,:], θ[i,:], 'k', lw=1, alpha=0.1)
for j in range(0, n_vis, 4):
ax2.plot(r[:,j], θ[:,j], 'k', lw=1, alpha=0.1)
ax2.set(xlabel="r", ylabel="θ", aspect="equal")
fig.colorbar(c2, ax=ax2, label="p (×100)", shrink=0.9)
plt.show()
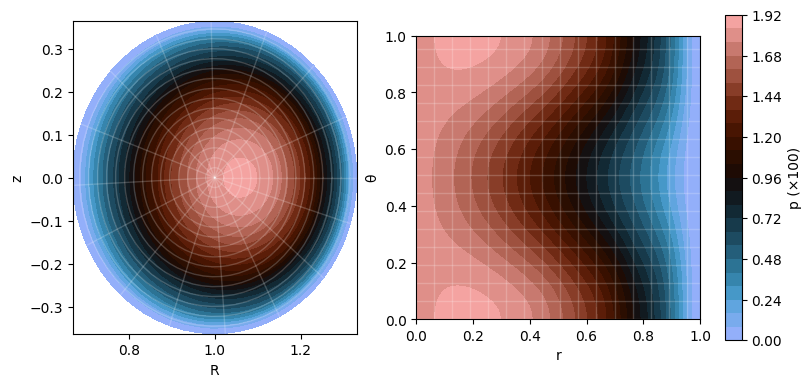
We can estimate the Shafranov shift by finding the location of maximum pressure in the physical domain and measuring its distance from the domain center \((R_0, Z_0) = (1, 0)\).
[100]:
x_p_max = _x[jnp.argmax(p_vals)] # cartesian coordinates of argmax p(x)
δR = jnp.linalg.norm(x_p_max - jnp.array([1.0, 0.0, 0.0]))
print(f"Shafranov shift: δR/R₀ ≈ {δR:.2e} = {δR / ɛ:.2f} ɛ")
Shafranov shift: δR/R₀ ≈ 5.76e-02 = 0.17 ɛ
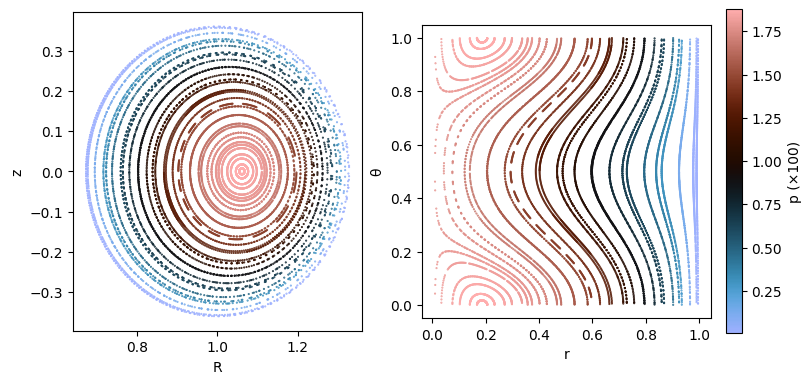
Lastly, we compute a Poincaré plot of the field lines to visualize the magnetic surfaces. We trace field lines by integrating the magnetic field in the logical domain where it hold (see the MRX paper for details):
The actual integration is done with the diffrax package.
[ ]:
B_h = DiscreteFunction(state.B_n, Seq.Lambda_2, Seq.E2)
def vector_field(t, x, args):
x %= 1.0
Bx = B_h(jnp.array(x))
DFx = jax.jacfwd(Phi)(jnp.array(x))
return Bx / jnp.linalg.norm(DFx @ Bx)
def integrate_fieldline(f, x0, N, t1):
t0 = 0.0
sol = dfx.diffeqsolve(
terms = dfx.ODETerm(f),
solver = dfx.Dopri5(),
t0 = t0,
t1 = t1,
dt0 = 0.05,
y0 = x0,
saveat = dfx.SaveAt(ts=jnp.linspace(t0, t1, N)),
stepsize_controller = dfx.PIDController(rtol=1e-8, atol=1e-8),
max_steps = 100_000)
return sol.ys
We can vectorize the field line tracing over multiple starting points. Starting points on the line \(\{ \hat x = (r, 0, 0) : \epsilon < r < 1 - \epsilon \}\). The computed trajectories are in logical coordinates and we map them to physical coordinates for visualization.
Integrating 32 field lines until \(T = 2 \times 10^3\) takes around 2 minutes on a M1 CPU and produces roughly \(2 \times 10^3 / (2 \pi) \approx 3 \times 10^2\) toroidal turns per field line. We store \(N = 10 T\) samples per field line for visualization.
[ ]:
T = 2000
N = 10 * T
n_traj = 32
r_vals = jnp.linspace(0.01, 0.99, n_traj // 2)
x0s_theta0 = jnp.stack([r_vals, jnp.zeros_like(r_vals), jnp.zeros_like(r_vals)], axis=1)
x0s_theta05 = jnp.stack([r_vals, 0.5 * jnp.ones_like(r_vals), jnp.zeros_like(r_vals)], axis=1)
x0s = jnp.concatenate([x0s_theta0, x0s_theta05], axis=0)
B_h = jax.jit(DiscreteFunction(state.B_n, Seq.Lambda_2, Seq.E2))
logical_trajectories = jax.vmap(
lambda x0: integrate_fieldline(vector_field, x0, N, T)
)(x0s) % 1.0
physical_trajectories = jax.vmap(Phi)(logical_trajectories.reshape(-1, 3)).reshape(n_traj, N, 3)
To produce a Poincaré plot, we use a root-finding algorithm to find the intersection of the field lines with a given plane.
[128]:
intersections, idxs = jax.vmap(lambda t: intersect_with_plane(t, jnp.array([0.0, 1.0, 0.0]), 0.0, 3))(physical_trajectories)
To obtain said intersection points in the logical domain, we need to invert the map \(\Phi\). We do so via a Newton method, using the inverse circular cross-section tokamak map with aspect ratio \(\varepsilon\) as initial guess.
[129]:
logical_intersections = jax.vmap(
lambda pt: invert_map(Phi, pt, lambda x: approx_inverse_map(x, ɛ))
)(intersections.reshape(-1, 3)).reshape(intersections.shape) % 1
Lastly, we plot the Poincaré section in the physical domain and color the points by the pressure. Since JAX operates under the assumption of static shapes, the intersection points are padded to the shape of the trajectory array with NaNs. We mask these before plotting.
[134]:
mask = (~jnp.isnan(intersections[..., 0])) & (intersections[..., 0] > 0)
pts_phys = intersections[mask]
pts_log = logical_intersections[mask]
p_vals = jax.vmap(p_h)(pts_log)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(8, 4), constrained_layout=True)
# physical
s1 = ax1.scatter(
pts_phys[:, 0], pts_phys[:, 2],
c=p_vals*100,
cmap="berlin",
s=0.25,
)
ax1.set(xlabel="R", ylabel="z", aspect="equal")
# logical
r, θ = _rgrid.squeeze(), _θgrid.squeeze()
s2 = ax2.scatter(
pts_log[:, 0], pts_log[:, 1],
c=p_vals*100,
cmap="berlin",
s=0.25,
)
ax2.set(xlabel="r", ylabel="θ", aspect="equal")
fig.colorbar(s2, ax=ax2, label="p (×100)", shrink=0.9)
plt.show()
[ ]: